 我的跑道来了
我的跑道来了我的数码相机今天不在,请原谅。
[此贴子已经被作者于2005-12-9 23:57:13编辑过]
铝合金的?期待~~~~~~~好象没见过呀~~~~~~~
我设计铝合金跑道的理由:
1。结实耐用,不怕小朋友踩,比塑料强度高。
2。不易老化,受温度影响小,使用寿命长。
3。塑性强,变形后容易修复。
4。重量轻,组合方便,抗磨损。
5。摩擦系数大,轮胎不易打滑。
我的数码相机回来后,马上给大家看。
你做的跑道 有多少节啊?
哈,铝合金轨道,颠覆一切传动导轮设定
岂止是导轮设定呀。。。
恐怕所有车架都跟着一起变。
我就手工做了一节直道,试验一下。宽115mm,高50mm。数码相机一回来就发表。
不会吧?什么道理呢?能分析一下吧?
本人拒绝抬杠。请正面分析,好吗?
拿铝合金导轮和铝合金轨道摩擦一下,请问是什么感觉,会感觉到涩涩的么?
直道还好,弯道就够夸张了。
导轮的作用是提供车子的导向,并不能给车子提供动力。
此话按照“四驱工匠”你自己的逻辑,也只能说说对一半,
因为你曾说过要“利用”离心力,离心是由导轮接触弯道产生导向作用而形成。
所以如果离心真的能被利用,那么导轮可以“间接”被“利用”来提供动力。
另外一个例子,你可以参考一下:
不妨思考一下为什么里面大部分的车都是上面为塑料导轮,下面为铝导轮的设置。
如果真如你所说导轮仅提供“导向”,那么应该说上下导轮无所谓材质才对。
我一直坚持充分利用一切有益的辅助力量来帮助车子前进,我的这个观点是不会改变的。
我认为,力分为作用力和反作用力。我们利用的是推动车子前进的作用力,应当根据现有轨道的弧度,调整两组导轮之间的距离来实现,来利用这个作用力,这是一个我们需要的,向前进方向的作用力,也可以形象的理解为一个向前的“反弹力”。
单就导轮本身来说,我们要求它转动灵活,摩擦系数小。我们不用胶圈导轮的原因就在这里。分析一个问题,要分清局部和整体。
分析问题时,本人拒绝抬杠。
你是说要利用轨道壁的震动么?
应该是利用角度。不是振动。就轨道而言,理想的状态是:没有瞬间的变形,保持原有的形态。如果它不停的在变化,那么不可知的因素就太多了,我们怎么来研究?我认为,研究一个问题,必须有一个基准,也就是需要有一个固定的参照物,然后以此为基础来研究。
我放一个问题在这里,大家考虑一下:
机械设备中(包括汽车),广泛应用了凸轮机构。所有的凸轮机构在工作中,都有一个点,专业名称叫“死点"。凸轮工作是在往复圆周运动,当凸轮工作到死点位置是,运转就吃力,负载瞬间加大。但是运转继续进行,而不会停止。我们不妨从轨道车的角度去分析。就会明白许多道理。
管理员提示:连续的多个发言请发表在一个帖子内,谢谢配合!
[此贴子已经被FlowJZH于2005-12-12 12:22:39编辑过]
从“四驱工匠”你的发言来看,你对于“利用离心力”的概念,还停留在平面的层次上,给2点意见:
1. 从平面角度来“利用离心力”,并不是没有人想过。
本论坛建设之初就有人提出过类似的观点。
但是有一点事实请时刻牢记,就平面运动而言,车从直道入弯,一定受到的时阻力,不可能是动力。
否则,利用一个圆型轨道,就可能制造出“永动机”。
所以你所谓的“推动车子前进的作用力”,一定会被更大的阻力所抵消,从而造成的合力呈阻力。
因此,从平面的角度,与其说“利用离心力”,还不如说“优化车的受力”,
通过导轮平面位置上的设定,使车在弯道受到的“阻力”达到最小的程度,让车更平滑地过弯。
2. 目前轨道车的发展,大家都在“利用离心力”,但是方向,是在竖直层面上。
利用离心作用造成抬脚,从而在竖直层面上使车胎受到更大的压力,才有“可能”实现在弯道中的“加速”。
但是,目前大家所使用导轮设定,如之前给你所看那6辆车,都是如下一个模式:
上导轮为塑料与塑料接触,下导轮为塑料与铝合金接触。
如果轨道变成铝合金,那无论如何,上导轮已经至少是塑料与铝合金的接触。
下导轮如果是铝合金,那么会变成铝合金合铝合金接触。
在这种导轮设定下如何去“利用”离心而不造成更大的阻力,是一个目前还没有被探讨过的话题。
因此一切之前通用的导轮设定都会被颠覆重新来过。
从竖直层面上,并非导轮摩擦系数一定要小;
至少上面给你看的六辆车,都是遵循“上导轮摩擦系数小”、“下导轮摩擦系数大”这样一个原则来设置。
只有这样,才可在如弯后给车胎提供额外的下压,又不造成过多的摩擦损耗。
如果上导轮也采用铝合金,那么按照这种设置会增加抬脚时的摩擦。
铝合金轨道,除非不抬脚,否则,这将时一个很难克服的问题。
假设,加大了导轮的摩擦力和下压力,能否解决飞车问题,就一定不会飞车吗?假设,现在不要求车子抬脚,就一定不飞车吗?
我觉得,我们应该多接受一些新的观点和思路,这样轨道车研究的道路就会越走越宽,增加一些研究的内容,对于轨道车论坛来说,肯定是一件好事,人气会更旺,大家说对不对?
不明白“四驱工匠”你这几个问号想说明什么问题?
采用铝合金轨道会增加导轮在竖直层面上的摩擦。
但是以上我所说,并非和“飞车”相关,而是和目前大家流行的抬脚玩法的效率相关。
不知道你从哪里想出来飞车问题的。
铝合金轨道并非什么“新观点和思路”,实际上,把上下导轮都做成铝合金的,
在塑料轨道中,会起到类似(铝合金与塑料摩擦)的效果。
这种车不是没有人做过,但是没有人能跑出理想的成绩来。
你可以直接做辆上导轮为铝合金的车试试。
如果能在塑料轨道中有比上导轮是塑料的相同的车更好的表现,再去制作铝合金轨道也不迟。
不抬脚而跑出理想的车速,倒的确是一个比较新的课题。
不过请把研究方向放在如何弥补那部分没能“利用离心力”提高车在弯道的动力输出上,
而不是“不飞车”上。
抬脚不抬脚和飞车不飞车,无直接必然联系。
花哥呀。。。铝合金抛个光,会比塑料导轮还要滑,只是铝合金的滑,不适合拿来做上导轮罢了吧?上导轮也要一定的摩擦力的么。。。
造铝合金轨道最大的好处或许是可以造成下导轮接触的部分粗糙,上导轮接触的部分光滑。再加个变形少、动能损失小。。。至于后果如何,还是做出来看看才知道。
小花:
如果我用铝合金跑道,车的上导轮用铝合金导轮,下导轮用塑料导轮,是不是和你的理论是一致的?参考四驱车传动轴与钢片摩擦系数小的原理,我认为和你目前的理论是一致的。
四驱工匠:做一付铝合金龙王道造价要多少???
无论如何,铝合金跑道噪音肯定比塑胶跑道大。
引用四驱工匠在2005-12-12 16:55:51的发言:
如果我用铝合金跑道,车的上导轮用铝合金导轮,下导轮用塑料导轮,是不是和你的理论是一致的?参考四驱车传动轴与钢片摩擦系数小的原理,我认为和你目前的理论是一致的。
首先声明一点,之前所说不是“我的理论”。
目前在40节左右或以上的快车,基本都是这一导轮设定模式。
先不论你所提两种状况是否具有可比性。
这样的设定,已经构成“颠覆一切传统导轮设定”了。
原先已经设置好的车,现在都要把导轮重新上下换个个,大小也要重新打磨。
然后,再分析你所提出两种情况。
我认为这是不能等同的。
从结果来看,把四驱传动轴从支架上拿下,观察金属支架的接触面和轴的接触面,这两个面,是越磨越光滑的。
观察现有下金属导轮,就算放车前你把它抛光成镜面,一圈下来,还是毛的。
可能的道理我想有如下几点:
1. 轴和支架间有润滑油,并且两个面本来都比较光滑。
2. 轨道存在接缝、并且如果进行表面抛光成本也会提高,造成光滑的导轮也会逐渐被打毛。
3. 轴和支架材质为铁、钢等,在不生锈的情况下表面光洁度本来就高。
铝合金表面会有氧化层,导致光洁度差,这种情况在暴露在空气中的轨道上更容易发生。
[此贴子已经被FlowJZH于2005-12-12 19:17:14编辑过]
而且导轮是铝合金的、跑道也是铝合金的,这就造成跑道和导轮等毫损。跑长了导轮平了,跑道也被切出槽,为以后跑车带来麻烦。
谢谢大家对我提出问题的分析,本人表示感谢。
数码照片刚刚拍完,请问如何上传?我马上发,谢谢!
在“文件上传”那个框里,选择“浏览”,然后浏览你的电脑硬盘,选中你的照片。
然后按“上传”,完了之后在“发言内容”那个框里会多出你图片的代码。
之后编辑你的发言(不要去除图片代码),按“发表”即可。
怎么上传的这么慢?
请先确保你要上传的图片大小在100KB以内
推荐图片尺寸为600*400象素以内。
我的跑道来了
 跑道
跑道
 真不容易啊,出汗了,哈哈
真不容易啊,出汗了,哈哈



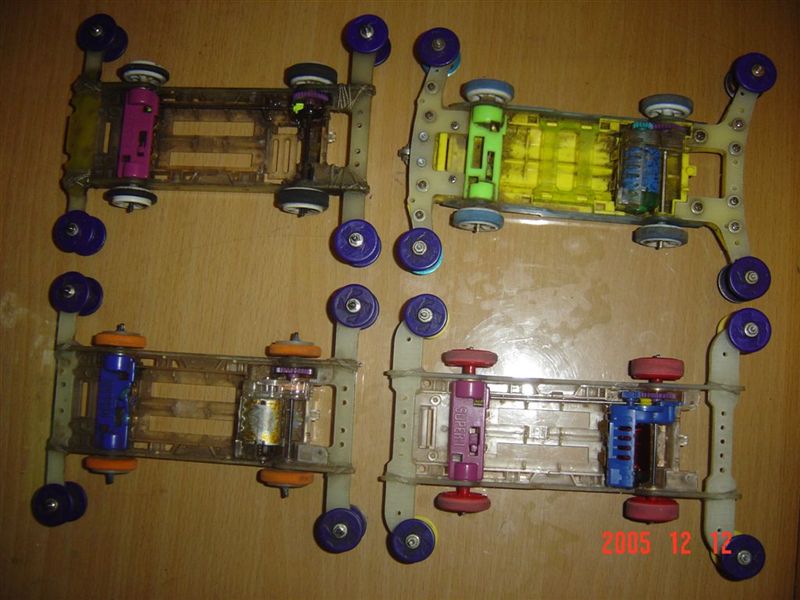 我的四驱
我的四驱
 我的三轮
我的三轮
还有好多,今天就发这些吧。
管理员提示:连续的多个发言请在一个帖子内发表,谢谢配合!以上发言已经合并
[此贴子已经被FlowJZH于2005-12-13 19:36:29编辑过]
四驱工匠:又一个问题想提问???
你为了想让车速的发展,也花了很大的物力,为何不去对你所用的电池和车的内在作提升和研究呢???
那个问题我也想问。。。
仍掉开关换电池、导轮比做铝轨道强了不知多少倍。
哈哈,这些电池不是轨道车用的,是我的数码相机用的。孩子还小,开关必须有。
请老徐给我的四驱和三轮指导一下,谢谢!
指导不敢当!!!交流可以......言重之处请谅解!!!!
1.从图中可见,导轮没有打磨......也就是等于还没理解打磨导轮的作用~~~更直接地说:不懂车的调整!!!
飞车是必定的结果......
2.从你各车来看,你所做的车基本上是跟风,也没有深入研究过内在的关系......轨道车不是玩具!!!按说明
书上抄就OK了.......
3.作为玩车者望少被某某品牌所限制,合理选材才是发展的动力......
四驱工匠:能否告知目前三轮、四轮分别冲到多少节?好有个评判标准。
我们这里没有龙王道。都是也是直道短,弯道长。我没数过多少节跑道,所以也说不出。
奥迪两轨标准跑道,四轮跑了5秒多,三轮6秒多。奥迪三轨:四轮16秒,三轮15秒。
没有一个统一的标准,是不好比较的。你觉得我的车能跑多少?
对不起!打错了,三轮5秒多,四轮6秒多。
谁能说说,为什么四轮跑不过三轮?
多了一份无谓的传动、多了一份重量,自然跑不过。
可是,四轮驱动跑不过两驱?
我觉得四驱慢,问题可能在前后轮传动系统方面,大家说呢?设计不合理,损耗过大。
事实上,我的车很少飞车。但是车可能有点重。
我觉得,轨道车的发展,需要生产厂家多一点,配件丰富一定,价格合理一点,我们才有广泛的选择余地。
成功的厂家,要有规模,要有市场占有率,要有新产品的开发能力,还要有好的质量。。。。。。。
如果一个厂家的产品,我们买不到,再加上比赛和活动少,结果可想而知。
四驱工匠:这几天与你的交流,总让人所看到你所提出这个不合理,那个不合理......请问:你有没有查找过自
身问题呢???你在做车过程中是否对每个传动部分理解到位了呢???本人认为只要把基础部分的每个环节
做到位了,车速自然会得到提升,并且借鉴其它车友做车的精华......
引用四驱工匠在2005-12-13 18:31:08的发言:
事实上,我的车很少飞车。但是车可能有点重。
我觉得,轨道车的发展,需要生产厂家多一点,配件丰富一定,价格合理一点,我们才有广泛的选择余地。
成功的厂家,要有规模,要有市场占有率,要有新产品的开发能力,还要有好的质量。。。。。。。
如果一个厂家的产品,我们买不到,再加上比赛和活动少,结果可想而知。
你说了很对!!!!但是,也请别忘了生产厂家再努力,没有当地的经销商配合,市场会完善吗???
老徐说的对,一点没错。
引用四驱工匠在2005-12-13 17:34:01的发言:
对不起!打错了,三轮5秒多,四轮6秒多。
谁能说说,为什么四轮跑不过三轮?
记得类似的讨论先前也有过,归结原因还是觉得出在两者驱动方式不同上。
人和袋鼠都是靠两条腿来奔跑,但是速度却是袋鼠快。
袋鼠的尾巴对于身体在跑动中所起的平衡作用,和三轮车第三轮在弯道中所起的作用类似。
他们的运动形式,都是前面驱动,后面保持平衡。
换作四驱车或者拆掉传动轴的“两驱车”,因为在平面上后两轮与三轮车的第三轮着地的位置有很大差异,导致这种平衡作用会被削弱。
因此四轮车又是另一种运动形态。
四条腿的动物例如猎豹,可以跑得比袋鼠还要快;
但是,绝对不能让它和袋鼠一样“跳”着跑,这不是发挥它四条腿优势的奔跑方式。
四驱车快的能跑到38节,我想应该比你这几辆三轮都快了。
这里,除了可能存在的动力差异外,是否正确利用了这两种不同形态的运动,也是一个很大的因素。
建议先买一个天豪的碳纤版四驱底盘+天豪传动轴看看。
那个传动轴调整。。。完全没需要操心,给它装上去开一开就完事了。
远不仅仅是轻松那么简单。。。
相信会让你对四驱车的传动系统有一个崭新的认识。
三轮比四轮加速慢,所以起跑时要推车。
引用EFS在2005-12-13 22:55:15的发言:
三轮比四轮加速慢,所以起跑时要推车。
前半句话可能还有那么点道理,毕竟三轮是两个轮子接触地面,启动时候动力的输出会受到影响。
但是后半句这个“所以”可千万别想当然加上去。
随便什么车起跑推一下一般来说总是比较划算的吧?
但在比较小的跑道(五六十节),不推车,起跑快的四轮应占些优势。不能绝对就说三轮比四轮快。
加速力跟驱动轮的多少没关系吧...
关键是车胎总抓地力和位置以及动力.(重量问题...在轨道车上不知道该怎么讲)
我认为不同的动力特性才是产生加速力差异的主要问题.
在真车界里,前轮驱动加速快还是后轮驱动?(指小轿车,功率相同,暂不考虑四驱)
但是到了轨道车上就有很多"失真"和结构不同的问题了.
我提一个问题:真车能做漂移的只有后轮驱动的,而前驱车却不能。
是否可以运用在我们的轨道车理论中?是否更利于转向?
另外,请大家给我推荐一下轨道车用电池。我现在用的是三洋和AD的,谢谢!
哎呀,前后驱都可以做漂移么,只是形式不同,效果不同.
轨道车不需要做漂移,真想要它失去抓地力,抬起来就好.
这倒是,那就找个近点的:1/10电动越野
目前1/10电越分两种:两驱和四驱。在电机、电池、电调、车重等都相差无几的时侯,这两种车的起步加速几乎相同,这是为什么?
细观这两种车,发现两驱的车重心比四驱的靠后,是不是这个原因导至上面的现像?
电越?还是远了点吧...
轨道车是用车胎摩擦力的,不是刨掘力的...
我说的漂移现象,只有后轮驱动的车能做,不信就去问问汽车专家。我的意思是,我们轨道车能不能利用这种现象。
刨掘力?!挖掘机?让电越在柏油路上跑也是同样。
引用四驱工匠在2005-12-13 23:41:50的发言:
我说的漂移现象,只有后轮驱动的车能做,不信就去问问汽车专家。我的意思是,我们轨道车能不能利用这种现象。
只要技术到家什么车都能飘啦,汽车专家?不用了,看电视就可以了.
汽车真要比漂,还是4驱快...
轨道车根本不需要漂,牢牢抓地照样能解决侧向摩擦问题.
而且本来就怕失去驱动力还要转弯加速的轨道车去做漂移...没人看啦.
不过飘前面的车子倒是一大堆...
我试验过:
让三轮反过来跑,速度会慢很多,为什么?
引用EFS在2005-12-13 23:42:32的发言:那是因为抓地够,动力没有超出车胎的承受能力,当然差不多了.
刨掘力?!挖掘机?让电越在柏油路上跑也是同样。
其实,快和灵活是两个不同的概念,大家仔细想想。。。。。。
任何车辆的行走,都是靠轮胎与地面的摩擦力来实现的。假设车子轮胎材质一样的情况下,必然是车子越重,轮胎对地面的接触面积越大,摩擦力越大,那么抓地力就越大,反之就越小。同时,也必然会使负载加大,耗电量加大,电流上升。结果是,重量轻的车子起步快,重量大的车子起步慢。
我们必须兼顾这些方面,来满足我们的要求。
各位,起步的问题,和车胎的材料、车重、车胎打磨的方式等都有关系。
还请从多个角度思考和分析。
就算是同样材料、打磨方式不同,也会造成车在起步和正常行驶时的表现差异。
另外三轮“正”跑,之所以没有倒跑快,我想有如下两点原因:
1. “倒”跑三轮用的是“袋鼠原理”,第三轮控制平衡;
让袋鼠倒过来跳,当然不会比正的时候来得高效。
2. “倒”跑三轮中,因为动力输出而对车身所造成的反力矩是转向轨道面的,使得车体可以稳定。
“正”跑三轮这一反力矩和轨道面相反,即前面的第三轮是一直呈“抬起”趋势,没有“点地”的可能。
如上差异导致传统袋鼠模式无法运用到“正”跑三轮上,
当然,如果能设计出其他有效的模式,也未必会比倒跑慢。
还不是个动态平衡的问题,“倒”跑车抬第三轮可以稳定,“正”跑车抬第三轮定飞。
花哥,除了动力输出方向之外,先不管它什么“袋鼠模式”导轮角度的变化才是主要的吧。。。
同一台小推车,当我们拉它走的时候,就省力,而且速度也快。推它走时,就比较费力,速度也慢。为什么?我们不妨从力学角度来分析。
轨道车跟那个不是一回事吧。。。
我们有轨道和离心力“把住方向”呀。
我们现在讨论的问题与方向没有丝毫的关系。要从力学角度来分析。
至于三轮为什么不倒跑有一个主要原因:跑道存在接缝,会把蛙腿弹起来,导致飞车。
你做这点铝合金跑道用了多少M?
想知道做条龙王道要多少M!!
搞一条铝合金龙王道,每年比赛都用,嘿嘿,应该可以最少爽5年!
引用四驱工匠在2005-12-14 16:18:44的发言:这只是你自己的感觉,实际上你对小车做的功是一样的。
同一台小推车,当我们拉它走的时候,就省力,而且速度也快。推它走时,就比较费力,速度也慢。为什么?我们不妨从力学角度来分析。
三轮车倒正跑的力学分析,我想这个帖子中已经说明得很清楚了:
心血来潮,研究直升机
第三轮在“正”跑时候会有“抬”的趋势,是轮子旋转后的必然结果。
当然,轨道接缝也有增加这种趋势的可能。
以下内容为引用:
花哥,除了动力输出方向之外,先不管它什么“袋鼠模式”导轮角度的变化才是主要的吧。。。
导轮角度为其次,主要是你的尾巴在什么地方,是否可以对身体的平衡起到调整作用。
袋鼠跑跳时是靠尾巴上下摆动来保持平横的。
引用EFS在2005-12-14 18:36:21的发言:这就牵扯到了力学中“矢量”概念了。
这只是你自己的感觉,实际上你对小车做的功是一样的。
争啥啊
有意义伐?
把铝合金跑道做出来跑跑看
结果就出来了
引用四驱工匠在2005-12-14 19:56:26的发言:
袋鼠在运动过程中,是靠尾部来平衡身体的重心,身体的运动幅度越大,尾部的调节幅度就越大;身体的运动速度越快,尾部的调节频率就越快。可以想想:体形较大的恐龙,不也有一个又粗又大的尾巴吗?其实都是为了保持身体的平衡。都是两条腿,鸵鸟的速度也不慢啊?
说得在理,“倒”跑三轮车就是具备了这样一条可以根据速度来调整摆动频率的“尾巴”。
“正”跑三轮或者拆掉传动轴的四驱车,就没有这样的尾巴了,虽然,他们也是两个轮子在驱动。
只要找准适合自己的合理运动方式,无论几条腿或几个轮子,都能进行高效的动力输出。
就算是4条腿的猎豹,也能跑得比两条腿的袋鼠或者鸵鸟快。
所以关键,还看做车人是不是能想出巧妙的结构来;
而不在于在几个轮子驱动或者正跑还是倒跑。
引用武汉原子团在2005-12-14 18:31:21的发言:这是一个试验品。我计算过,铝合金制作每节成本十几元。(三轨的)我不知道龙王道一节多少钱。我觉得,寿命5年不止。特别适合轨道车商店用。
你做这点铝合金跑道用了多少M?
想知道做条龙王道要多少M!!
搞一条铝合金龙王道,每年比赛都用,嘿嘿,应该可以最少爽5年!
引用FlowJZH在2005-12-14 20:03:26的发言:现在问题又来了:鸵鸟是靠身体前方的脖子来保持平衡的,怎么解释?
说得在理,“倒”跑三轮车就是具备了这样一条可以根据速度来调整摆动频率的“尾巴”。
“正”跑三轮或者拆掉传动轴的四驱车,就没有这样的尾巴了,虽然,他们也是两个轮子在驱动。只要找准适合自己的合理运动方式,无论几条腿或几个轮子,都能进行高效的动力输出。
就算是4条腿的猎豹,也能跑得比两条腿的袋鼠或者鸵鸟快。所以关键,还看做车人是不是能想出巧妙的结构来;
而不在于在几个轮子驱动或者正跑还是倒跑。
很简单啊,把“倒”跑的(袋鼠原理)的三轮车“正”过来,并不是说就能利用前面的第三轮进行平衡了啊。
当然,你也可以利用所谓的“鸵鸟原理”,但是必须对车的结构进行修改。
否则,第三轮只有上抬的趋势而不会有下压的趋势,就起不到平衡的效果了。
引用四驱工匠在2005-12-14 20:09:09的发言:
这是一个试验品。我计算过,铝合金制作每节成本十几元。(三轨的)我不知道龙王道一节多少钱。我觉得,寿命5年不止。特别适合轨道车商店用。
用铁的将更合算......台湾、大陆都有人做过......
关键就是看弯道的精度了......
引用老徐在2005-12-15 0:06:38的发言:精度不成问题,我本来就是学机械的,车间里面车、铣、刨,磨,线切割、龙门刨。。。。。什么设备都有,工人的技术一流。
用铁的将更合算......台湾、大陆都有人做过......
关键就是看弯道的精度了......
引用四驱工匠在2005-12-15 8:46:28的发言:精度不成问题,我本来就是学机械的,车间里面车、铣、刨,磨,线切割、龙门刨。。。。。什么设备都有,工人的技术一流。[/quote]
[quote=老徐,2005-12-15 0:06:38]用铁的将更合算......台湾、大陆都有人做过......
关键就是看弯道的精度了......
别忘了,你这是借公见私......如果把那些设备合算的成本中会怎样???[em05
引用四驱工匠在2005-12-14 19:56:26的发言:但别忘了驼鸟和恐龙都是两腿交替蹬地,袋鼠为双腿同时登地!
这就牵扯到了力学中“矢量”概念了。
另外,袋鼠在运动过程中,是靠尾部来平衡身体的重心,身体的运动幅度越大,尾部的调节幅度就越大;身体的运动速度越快,尾部的调节频率就越快。可以想想:体形较大的恐龙,不也有一个又粗又大的尾巴吗?其实都是为了保持身体的平衡。都是两条腿,鸵鸟的速度也不慢啊?
引用EFS在2005-12-15 16:47:11的发言:难道美洲豹不是交替蹬地?
但别忘了驼鸟和恐龙都是两腿交替蹬地,袋鼠为双腿同时登地!
可美洲豹是“四驱”呀
引用四驱工匠在2005-12-15 20:37:28的发言:
难道美洲豹不是交替蹬地?
觉得四驱工匠车友有些混淆了。
这几个例子是我举来说明不同问题的,为了便于车友理解而设立,
混合着来看的话,因为毕竟不是实际问题,当然不能完全去套用。
把这几个例子理一下:
袋鼠:倒跑三轮的运动模式,用于说明第三轮可用来象袋鼠一样平衡身体,提高速度,而正跑三轮不具备。
袋鼠和美洲豹:三轮和四轮的主要区别,用来说明这完全是两种不同的运动模式。
驼鸟:并非我所提,但是既然提出了,可以把它归结为另一种靠前部平衡的运动形态,只是目前还未在轨道车中运用。
请各位再涉及这类问题时要看清前提条件,不要把和轨道车无关的特性也讨论进来,
毕竟我们这里不是讨论动物运动的论坛
讨论和辩论是两个不同的概念。在论坛上,我们应该去讨论,而不应该去辩论,回到实质性的问题上来,多谈谈技术性的话题。如果有人请教,愿意告诉的你就告诉他,不愿意说的或者需要保密的就可以不回答,这是每个人的自由。就像武侠小说里说的:高手无处不作,正所谓,天外有天、人外有人。
真看不懂,四驱工匠你从什么地方出发,能接出这样的话啊?
谁在讨论,谁在辩论?
谁在讨论实质性话题谁又不在?
谁在告诉别人谁在遮遮掩掩呢?
铝合金的跑道呢?????????????????????????????????????????????????
跑道为一小段,已经发表在上面,看贴要仔细
引用李艺超在2005-12-16 22:32:03的发言:
铝合金的跑道呢?????????????????????????????????????????????????

 此跑道只是一段试验品。
此跑道只是一段试验品。
兄弟,你那个是不是SONY4300的电池?或是4600的?
车看着有点脏